Кінематика механізму передачі обертового руху ланцюгового варіатора з втулково - роликовим ланцюгом.
| [ Викачати з сервера (834.5 Kb) ] | 01.10.2014, 14:18 |
| УДК 621.855 КІНЕМАТИКА МЕХАНІЗМУ ПЕРЕДАЧІ ОБЕРТОВОГО РУХУ ЛАНЦЮГОВОГО ВАРІАТОРА З ВТУЛКОВО - РОЛИКОВИМ ЛАНЦЮГОМ. А.В. Спісак, інженер. Західний науково – дослідний центр інженерії агротехнологічних систем ННЦ «ІМЕСГ». Варіатор, кінематична схема, втулково – роликовий ланцюг. Обґрунтовано принципову кінематичну схему, наведено результати теоретичного дослідження кінематичних залежностей для механізму ланцюгового варіатора з втулково – роликовим ланцюгом. Постановка проблеми. У приводах механізмів, де є необхідність плавно змінювати передавальне число в процесі роботи машини, застосовуються варіатори. У випадках, коли необхідний діапазон регулювання Д = 2 ÷ 6 [ 1 ] часто застосовується клино – пасовий варіатор. Клино – пасовий варіатор має просту конструкцію, простий в обслуговуванні. Передавання обертового руху відбувається за рахунок сили тертя між поверхнями паса і шківів. Недоліки цього варіатора ті ж самі що і пасової передачі, - збільшення проковзування паса при попаданні на поверхні тертя води чи мастильних матеріалів, збільшення проковзування паса при збільшенні корисного навантаження приводу . Спробою уникнути цих недоліків є застосування ланцюгового варіатора із пластинчастим ланцюгом. Передавання обертового руху у ньому відбувається частково за рахунок сили тертя між поверхнями ланцюга і профільованих дисків, частково за рахунок зачеплення. Діапазон регулювання ланцюгового варіатора із пластинчастим ланцюгом Д = 2 ÷ 6 [ 1 ]. Він конструктивно складніший, дорожчий, важчий, хоч має менші габарити. Застосовується, як правило у стаціонарних механізмах. Існує потреба в розробці та дослідженні варіатора, у якому гнучкою ланкою слугував би втулково – роликовий ланцюг, передавання обертового руху відбувалося б за рахунок зачеплення. Аналіз останніх досліджень і публікацій. Запропоновано спосіб передачі обертового руху та регулювання швидкості втулково – роликовим ланцюгом [ 2 ], та вузол передачі обертового руху ланцюгового варіатора [ 3,4 ]. Розглянуто кінематичні і динамічні залежності для механізму ланцюгової передачі [ 5,6,7 ]. Кінематика механізму передачі обертового руху ланцюгового варіатора, що розглядається, подібна до кінематики ланцюгової передачі, але має певні відмінності, розгляду яких присвячена дана стаття. Постановка завдання. Обґрунтувати принцип роботи і кінематичну схему варіатора. Викласти результати теоретичних досліджень кінематики механізму передачі обертового руху варіатора. Виклад основного матеріалу. Обґрунтування кінематичної схеми. Конструкція варіатора повинна бути розроблена так, щоб можливо було застосувати втулково-роликовий ланцюг, який би охоплював і одночасно підтримувався шківами , передавав би рух від одного шківа до другого шляхом зачеплення а регулювання передачі було б аналогічне регулюванню клино – пасового варіатора. В цьому випадку для зачеплення ланцюга зі шківом необхідно ввести у конструкцію шківа елементи зачеплення (зачепи) для взаємодії з роликами ланцюга. Ці елементи зачеплення повинні мати властивість самонастроюватися при входженні в зачеплення з ланцюгом та передавати зусилля на ланцюг при обертанні шківа. Цим вимогам відповідає пара зубчатих елементів (наприклад зірочок) [ 2, 3, 4 ] зачеплених між собою так, що поворот одного елемента викликає поворот другого в протилежному напрямку, (див. рис.1). 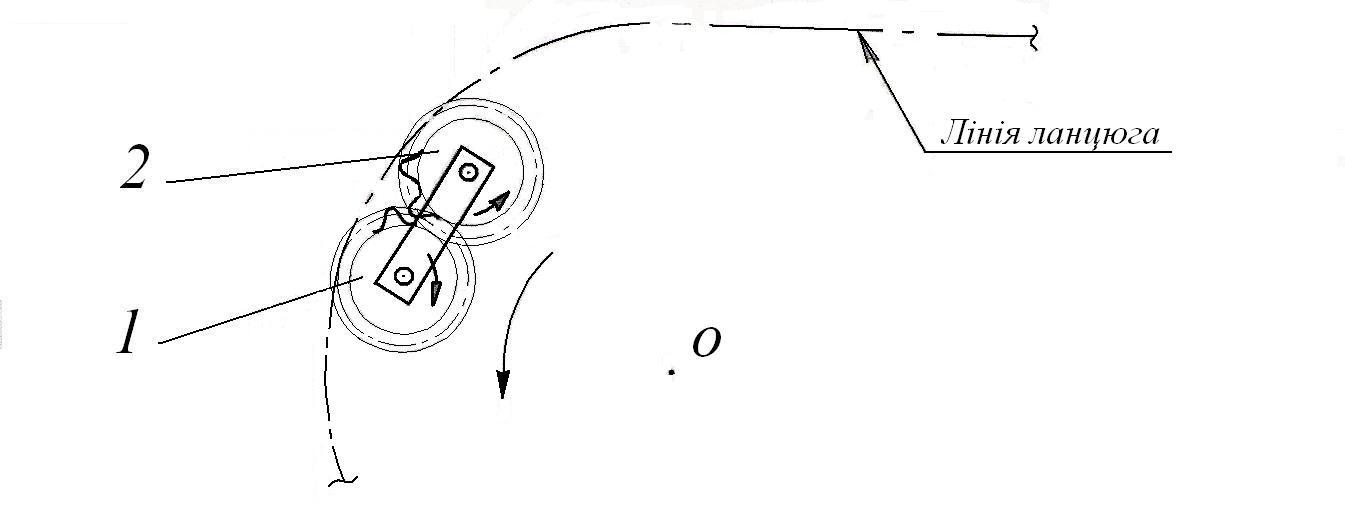 Рис. 1. Схема використання пари зірочок у якості елемента зачеплення; 1, 2 – зірочки. При повороті шківа (шків не показано) навколо осі 0, у зачеплення з ланцюгом входить зірочка 1. Якщо зуб зірочки 1 вдаряється у ролик ланцюга, зірочка 1 провертається і повертає зірочку 2, яка вільна у цей момент від зачеплення з ланцюгом. Коли одночасно в зачепленні з ланцюгом опиняються обидві зірочки пари, то їх поворот відносно своїх осей неможливий. Отже вони відіграють роль зачепа і передають обертальний рух шківа ланцюгу. Такий спосіб передачі руху на ланцюг має свої недоліки. Основним недоліком є неможливість регулювання швидкості в момент, коли з ланцюгом зачеплені хоча б дві пари зірочок одночасно. Схема охоплення ланцюгом конусних пів шківів із елементами зачеплення у вигляді пар зірочок показана на рис.2 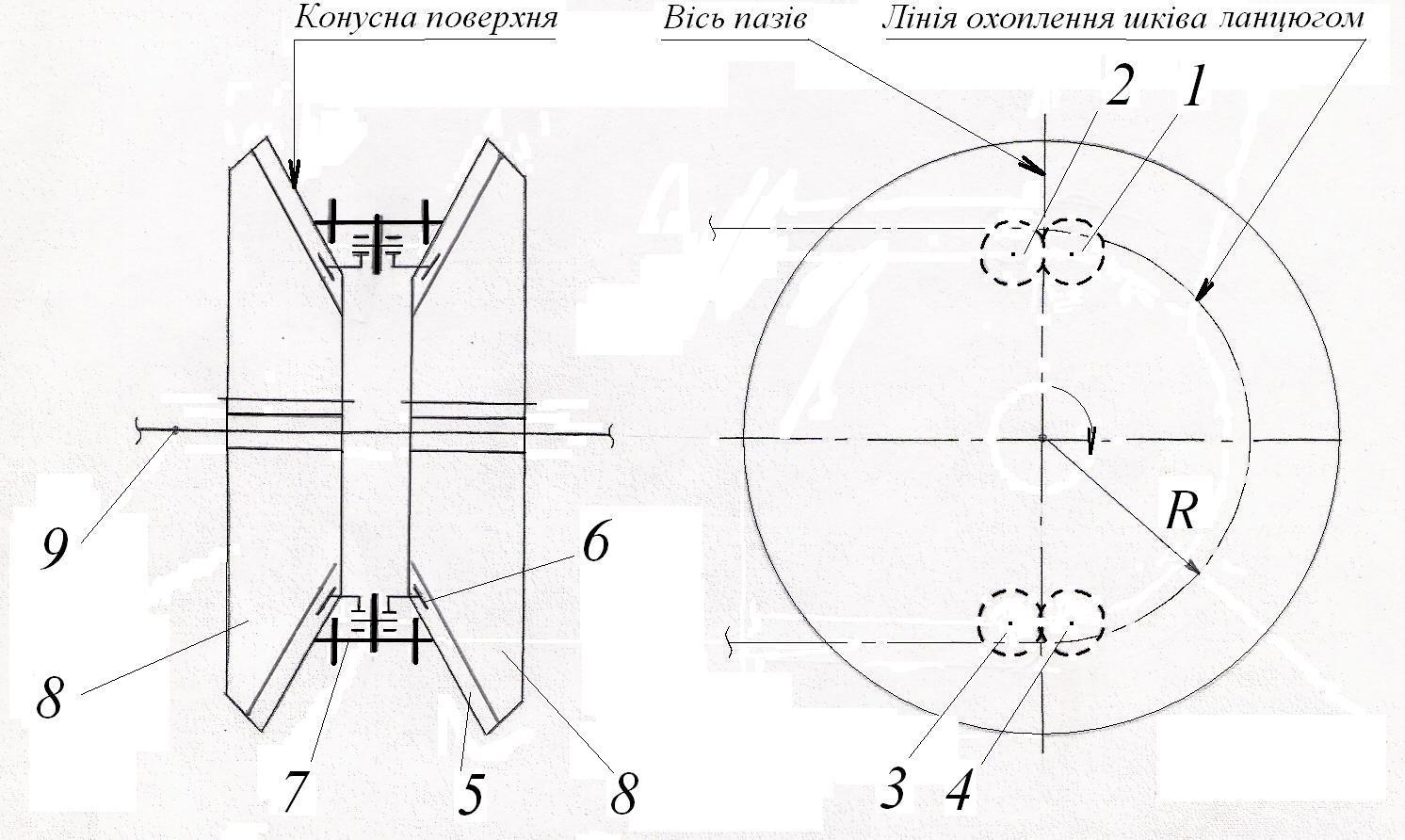 Рис. 2. Схема охоплення ланцюгом конусних пів шківів; 1 – 2, 3 – 4, -пари зірочок; 5 – паз; 6 – повзун; 7 – ланцюг; 8 – півшків; 9 – вісь. Шків містить дві діаметрально протилежні пари зірочок 1 -2 та 3 -4, кожна пара зірочок встановлена на своєму повзуні 6. Повзун 6 знаходиться одночасно в направляючих пазах 5 обох півшківів 8. Шків складається із двох конусних півшківів 8, що знаходяться на одному валі 9, можуть переміщуватися вздовж вала і передавати на нього момент. Вздовж конусної поверхні у кожному півшківі зроблено охоплюючого профілю радіальні пази 5. Конструкція виконана так, що при охопленні шківа ланцюгом 7, ланцюг 7 одночасно опирається на конусні поверхні шківа а своїми роликами попадає у впадини зірочок зачепів. Ця властивість зберігається при наближенні – віддаленні півшківів між собою (зміні радіуса R охоплення шківа ланцюгом). [ 2, 3, 4 ] При застосуванні таких шківів у передачі, регулюючий механізм не повинен дозволяти регулювання шківів незалежно один від одного, якщо в конструкції немає пристрою для натягування ланцюга. Самі шківи повинні містити дві діаметрально протилежні відносно 0 пари зірочок 1-2 та 3-4, див. рис.2, рис.3. Регулювання такого шківа може відбуватися в певному положенні пар зірочок, див. рис.3. 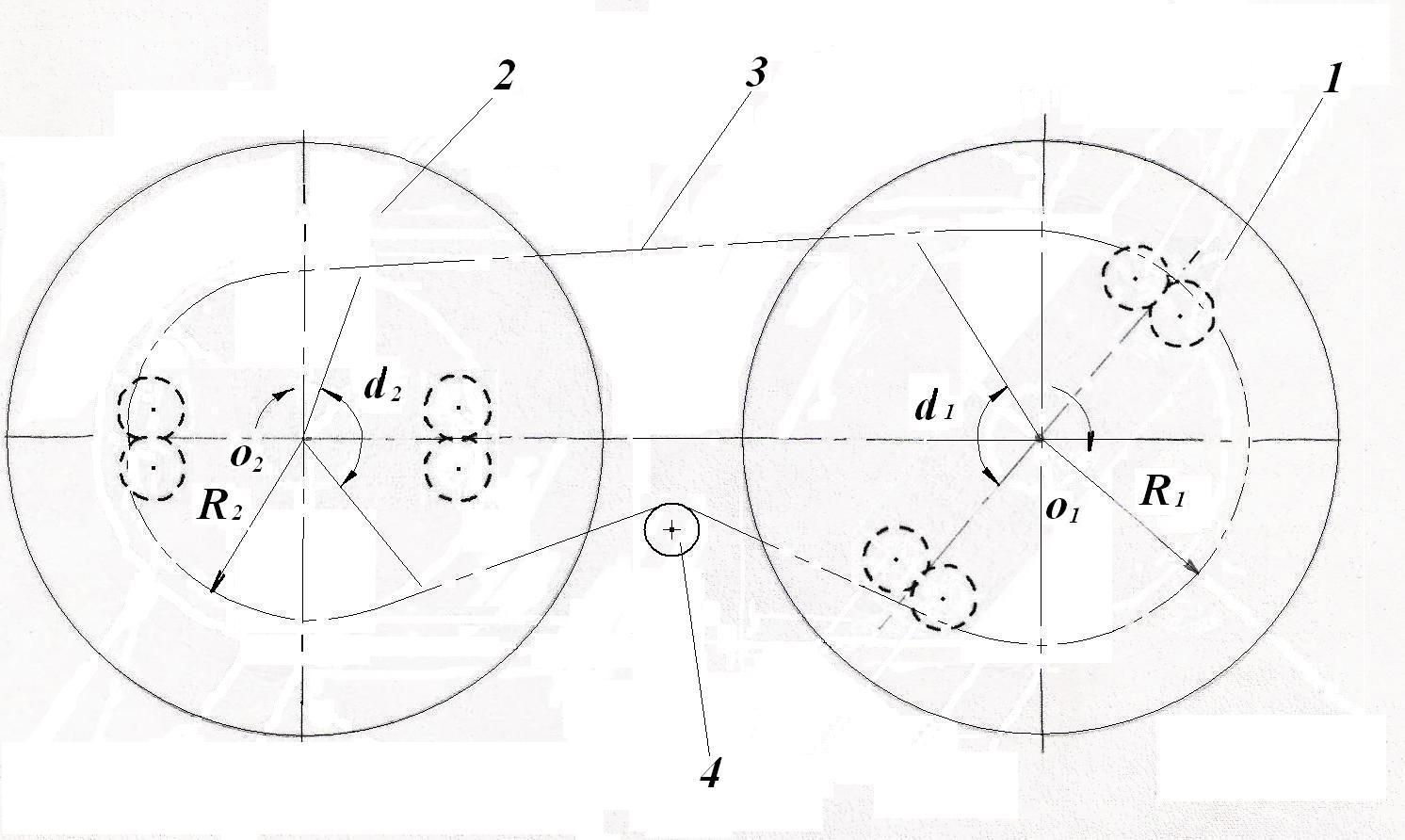 Рис. 3. Кінематична схема ланцюгового варіатора в положенні пар зірочок, придатному для регулювання; 1 – ведучий шків; 2 – ведений шків; 3 – ланцюг; 4 – ролик пристрою для натягування ланцюга; О1 – вісь ведучого шківа; О2 – вісь веденого шківа; R1 - радіус охоплення ведучого шківа ланцюгом; R2 - радіус охоплення веденого шківа ланцюгом; α1, α2 – кути, в межах яких можливе регулювання варіатора. Якщо для даних значень R1та R2 пара зірочок ведучого шківа знаходиться в межах кута α1 а пара зірочок веденого шківа знаходиться в межах кута α2, таке положення придатне для регулювання передавального числа варіатора. Таким чином завдяки застосуванню в якості зачепів пар зірочок, вдалось виконати поставлену задачу, хоча і з недоліками, – виконана на основі запропонованих шківів передача буде мати положення, при яких регулювання не можливе. Кінематика механізму цього ланцюгового варіатора подібна до кінематики ланцюгової передачі. Припускаючи, що ланцюг опирається на конусні поверхні шківа торцевими поверхнями осей роликів а також вважаючи, що відстань між точками дотику рівна кроку ланцюга t, можна по аналогії з ланцюговою передачею записати кінематичні рівняння для осі ролика ланцюга, котра входить в контакт із ведучим шківом. Ці рівняння будуть дійсні при умові, що на протязі часу від входження в контакт зі шківом осі ролика що розглядається, до входження в контакт зі шківом осі наступного ролика, не відбувається зміщення ланцюга вздовж лінії охоплення шківа спричинене вибиранням зазорів між роликами ланцюга та зірочками елемента зачеплення (зачепа). 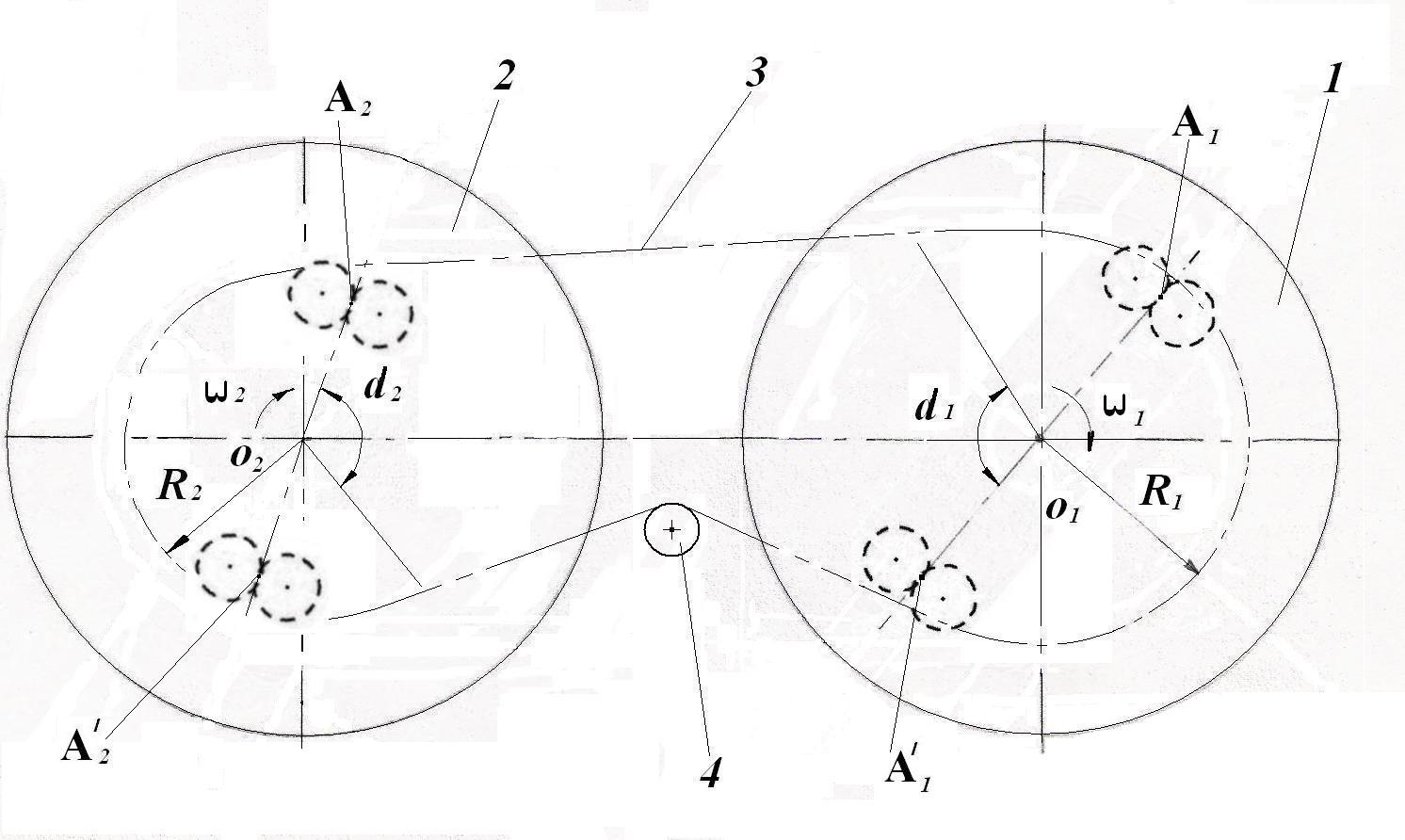 Рис. 4. Схема набігання ланцюга на ведучий шків; О1 – вісь ведучого шківа; ω1 – кутова швидкість ведучого шківа; R1 – радіус розміщення осей роликів ланцюга відносно осі ведучого шківа; a – точка дотику осі ролика ланцюга до шківа в початковий момент часу; aτ – розміщення осі ролика в деякий момент часу τ; ω1τ – кут, на який перемістилася вісь ролика за час τ; β – половина кута утвореного осями сусідніх роликів, що лежать на колі радіуса R1 і віссю О1; t – крок ланцюга; Sx, Sy – переміщення осі ролика а відносно осей координат X, Y за час τ; Vx, Vy, проекції вектора миттєвої швидкості осі ролика в момент часу τ; V – вектор миттєвої швидкості осі ролика в момент часу τ; a2 – вісь наступного ролика. На рис. 4 схематично зображено два положення ведучого шківа із ланцюгом, що на нього набігає. Зірочки елементів зачеплення (зачепів) не зображено. Пунктирними лініями зображено ланцюг в початковий момент часу, коли вісь ролика ланцюга входить в контакт із ведучим шківом. Суцільними лініями зображено ланцюг в момент часу τ. Кут β визначається із залежності:  , (1) , (1)Період входження в контакт осі ролика зі шківом до моменту доторкання до шківа осі наступного ролика (час повороту ведучого шківа на кут 2β) визначається переробленою з [5] формулою:  , (2) , (2)Проекції переміщення, миттєвої швидкості, миттєвого прискорення Sx, Sy, Vx, Vy, Jx, Jy осі ролика описуються формулами переробленими з [5]:    ; ; (3) (3) ; ; τ- поточний час; Як і в ланцюговій передачі, ролик ланцюга, що набігає на ведучий шків, переміщується із періодично змінними швидкістю і прискоренням. Нерівномірний рух ланцюга спричинює нерівномірне обертання веденого шківа. На протязі деякого часу, за який не відбувається зміщення ланцюга вздовж лінії охоплення шківа спричинене вибиранням зазорів між роликами ланцюга та зірочками елемента зачеплення (зачепа) на обох шківах, дійсна формула для визначення поточного значення кутової швидкості веденого шківа, що застосовується для ланцюгової передачі [5]: ω2 є змінною величиною, яка залежить не тільки від радіусів R1 і R2 але і від відстані між осями шківів і довжини ланцюга [6,7]. Значення середньої кутової швидкості веденого шківа визначається відомою формулою: На протязі цього часу коефіцієнт нерівномірності обертання веденої системи δω , який характеризує відносну зміну кутової швидкості веденого шківа визначається формулою [6,7]: Вплив зміщення ланцюга відносно шківів, спричиненого вибиранням зазорів між роликами ланцюга та зачепам на обох шківах на кінематику веденого шківа варіатора можна з’ясувати з наступного рис. 5. Приймемо, що рух за інерцією обох шківів та ланцюга відсутній. При вибиранні зазорів між роликами ланцюга та зірочками зачепа ланцюг зміщується на деяку величину ΔL однакову для обох шківів. Нехай для даних значень R1та R2 зачепи ведучого шківа знаходиться в точках А1та А1/ а зачепи веденого шківа знаходиться в точках А2 та А2/ . Починаючи з такого положення при обертанні ведучого шківа відбувається відпускання ланцюга зачепом в точці А1/ і вибирання зазорів в точці А1 (вираз «вибирання зазорів в точці» надалі означатиме процес вибирання зазорів який починається в точці), при цьому ведучий шків повернеться на кут рівний 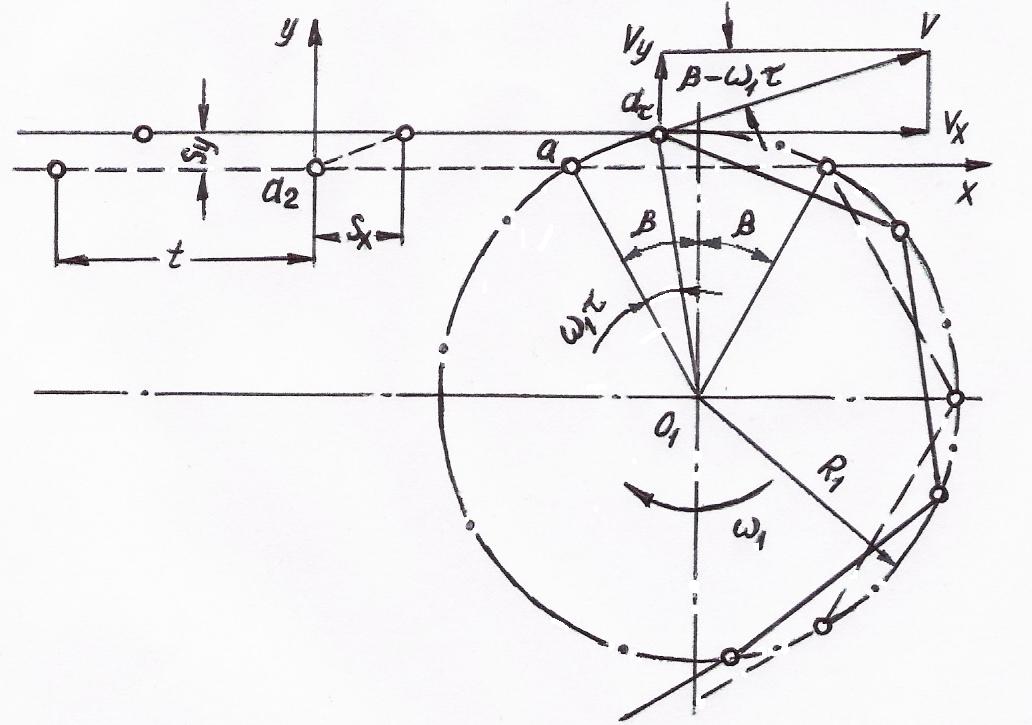 Рис. 5. Кінематична схема ланцюгового варіатора в початковому положенні пар зірочок, для визначення передавального відношення варіатора; 1 – ведучий шків; 2 – ведений шків; 3 – ланцюг; 4 – ролик пристрою для натягування ланцюга; О1 – вісь ведучого шківа; О2 – вісь веденого шківа; R1 - радіус охоплення ведучого шківа ланцюгом; R2 - радіус охоплення веденого шківа ланцюгом; α1, α2 – кути, в межах яких можливе регулювання варіатора; А1, А1/ , А2 , А2/ - точки початкового положення зачепів. Рис. 5. Кінематична схема ланцюгового варіатора в початковому положенні пар зірочок, для визначення передавального відношення варіатора; 1 – ведучий шків; 2 – ведений шків; 3 – ланцюг; 4 – ролик пристрою для натягування ланцюга; О1 – вісь ведучого шківа; О2 – вісь веденого шківа; R1 - радіус охоплення ведучого шківа ланцюгом; R2 - радіус охоплення веденого шківа ланцюгом; α1, α2 – кути, в межах яких можливе регулювання варіатора; А1, А1/ , А2 , А2/ - точки початкового положення зачепів.Нехай шків 1 обертається із постійною кутовою швидкістю ω1. Через певні проміжки часу Для визначення наближеного значення передавального відношення варіатора із рівняння : Визначимо Т, підставивши Це рівняння легко розв’язується методом ітерації, підставляючи цілі значення nі отримуємо значення хі. Слід зазначити, що розв’язком х необхідно вважати таке число, дробова частина якого не перевищує Наближене значення передавального відношення варіатора становить: Для визначення нерівномірності обертання веденої системи з врахуванням ΔL за прийнятих умов розглянемо графік рис.6. 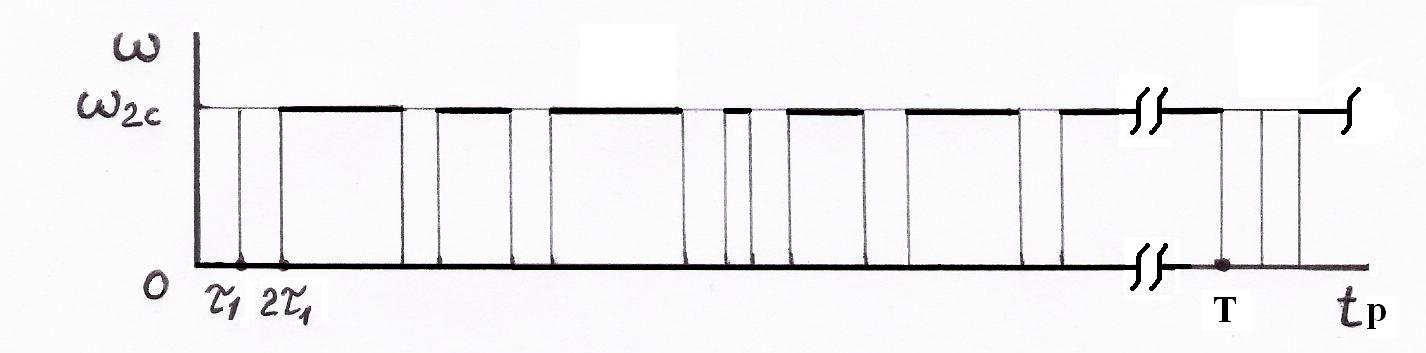 Рис.6. Графік зміни кутової швидкості веденого шківа ω в залежності від часу руху tp; ω2с– середня кутова швидкість; τ1 – час за який відбувається вибирання зазорів між ланцюгом і зачепом; Т – період. Початок графіка – прийняте початкове положення. Коефіцієнт нерівномірності обертання веденої системи δωΔL визначений за формулою з [6, 7] : При цих умовах можна розглядати рух веденої системи як рух із зупинками, деяка послідовність руху і зупинок періодично повторюється за період часу Т; Т залежить від ω1, ΔL, R1, R2. Приймемо що ведена система під час вибирання зазорів між ланцюгом і зачепом рухається за інерцією. Оскільки процес вибирання зазорів швидкоплинний а самі зазори достатньо малі, приймемо що рух веденої системи за інерцією рівносповільнений. При вибиранні зазорів тільки в точці А2/ , ведений шків рухаючись рівносповільнено з кутовим прискоренням –ε2 із початковою швидкістю ω2с за час t// повернеться на деякий менший кут φS2. Ланцюг, рухаючись по радіусу R2 із кутовою швидкістю ω2с за час t// повернеться на деякий більший кут φл2. По закінченні вибирання зазорів, різниця між цими кутами становитиме Звідси  ; ; (9) (9)ω//- кутова швидкість веденого шківа в момент закінчення вибирання зазорів в точці А2/; див.рис. 7. При вибиранні зазорів тільки в точці А1, ланцюг разом із веденим шківом рухаючись по радіусу R1 рівносповільнено з кутовим прискоренням –ε1, із початковою швидкістю ω1 за час t/ повернеться на деякий менший кут φл1. Ведучий шків, рухаючись із кутовою швидкістю ω1 за час t/ повернеться на деякий більший кут φs1. По закінченні вибирання зазорів, різниця між цими кутами становитиме кут Звідси  ; ;Кутова швидкість ланцюга в момент закінчення вибирання зазорів в точці А1 становить:  ; ;Кутова швидкість веденого шківа в цей момент становить:  ; див.рис. 7. (10) ; див.рис. 7. (10)Вважатимемо, що обидва шківи повернулися у точки А1 та А2/ одночасно. У початковому положенні, коли вибирання зазорів відбувається одночасно в точках А1 та А2/, ведений шків рухається із кутовим прискоренням –ε2, ланцюг опиняється нічим не зв’язаним зі шківами окрім сили тертя, рухається на поверхні ведучого шківа по радіусу R1 із кутовим прискоренням – εл. Рівняння руху в момент початку вибирання зазорів матимуть вигляд: - для ведучого шківа: - для ланцюга на ведучому шківі: - для ланцюга на веденому шківі - для веденого шківа На котрому зі шківів вибирання зазорів закінчиться раніше залежить від значень ε2, εл, R1, R2, ω1. Для вирішення цього питання необхідно визначити і порівняти час tХ , що може бути затрачений на вибирання зазорів у точках А1 та А2/. Для ведучого шківа рівняння запишуться:  , (11) , (11)для веденого шківа рівняння запишуться:  ; (12) ; (12)Менше із значень tХ означатиме, що саме на цьому шківі вибирання зазорів закінчиться раніше. Якщо значення tХ визначені за формулами (11), (12) рівні, то вибирання зазорів у початковому положенні на обох шківах відбудеться одночасно. tХ1 = tХ2 = tП див. рис. 7 (пунктирна лінія). Кутова швидкість веденого шківа в момент вибирання зазорів визначатиметься за формулою:  ; (13) ; (13)Нехай вибирання зазорів раніше відбувається в точці А1. tХ1 < tХ2 Час, затрачений на вибирання зазорів в точці А1 становитиме  . .Ведений шків за цей час повернеться на кут  , а ланцюг на веденому шківі повернеться на кут , а ланцюг на веденому шківі повернеться на кут  . Ведений шків в момент закінчення вибирання зазорів у точці А1 матиме кутову швидкість . Ведений шків в момент закінчення вибирання зазорів у точці А1 матиме кутову швидкість  . Як тільки відбулося вибирання зазорів у точці А1, рух ланцюга змінився і став рівномірним. Рівняння руху ланцюга на веденому шківі, враховуючи пройдений кут, матиме вигляд: . Як тільки відбулося вибирання зазорів у точці А1, рух ланцюга змінився і став рівномірним. Рівняння руху ланцюга на веденому шківі, враховуючи пройдений кут, матиме вигляд: Рівняння руху веденого шківа не змінилося, але оскільки ведений шків перемістився на визначений вище кут, запишеться:  Повністю вибирання зазорів в точці А2/ завершиться, якщо кут зміщення веденого шківа відносно ланцюга становитиме величину Визначення часу t///, необхідного для завершення вибирання зазорів у точці А2/ зводиться до розв’язування квадратного рівняння:  (14) (14)Один із розв’язків цього рівняння буде визначати час, необхідний для завершення процесу вибирання зазорів на веденому шківі. Весь час tП, необхідний для вибирання зазорів на веденому шківі, при заданих умовах може бути знайдений як сума: tП = tХ1 + t/// Кутова швидкість веденого шківа в момент вибирання зазорів визначатиметься за формулою: див. рис. 7 (пунктирна лінія) Нехай вибирання зазорів раніше відбувається в точці А2/. tХ2 < tХ1 Час, затрачений на вибирання зазорів в точці А2/ становитиме  . .Ведучий шків за цей час повернеться на кут  , а ланцюг на ведучому шківі повернеться на кут , а ланцюг на ведучому шківі повернеться на кут  . .В момент закінчення вибирання зазорів у точці А2/ , ланцюг на поверхні ведучого шківа матиме кутову швидкість :  Як тільки відбулося вибирання зазорів у точці А2/, ланцюг разом із веденим шківом починає рухатися рівносповільнено з однаковим кутовим прискоренням. Ланцюг з цього моменту на поверхні ведучого шківа рухається по радіусу R1 рівносповільнено з кутовим прискоренням –ε1, із початковою швидкістю . Рівняння руху ланцюга із врахуванням пройденого кута на поверхні ведучого шківа запишеться : Повністю вибирання зазорів в точці А1 завершиться, якщо кут зміщення ведучого шківа відносно ланцюга становитиме величину Визначення часу t1///, необхідного для завершення вибирання зазорів у точці А1 зводиться до розв’язування квадратного рівняння:  (16) (16)Один із розв’язків цього рівняння буде визначати час, необхідний для завершення процесу вибирання зазорів на ведучому шківі. Весь час tП, необхідний для вибирання зазорів на ведучому шківі, при заданих умовах може бути знайдений як сума: tП = tХ2 + t1/// Для того, щоб визначити кутову швидкість ωп веденого шківа при заданих умовах, необхідно знайти кутову швидкість веденого шківа ωх2 в момент часу tХ2 :  . Формула для ωп запишеться: . Формула для ωп запишеться: ; (17) ; (17)див. рис. 7 (ламана лінія)  Рис.7. Графік зміни кутової швидкості веденого шківа ω в залежності від часу руху tp при умові рівносповільненого руху веденої системи за інерцією; ω2с– середня кутова швидкість; τ1 – час за який відбувається вибирання зазорів між ланцюгом і зачепом при відсутній інерції; t/ - час вибирання зазорів тільки в точці А1; t// - час вибирання зазорів тільки в точці А2/; tП - час вибирання зазорів у початковому положенні; ω/ , ω// , ωп – відповідні значення кутової швидкості; Т – період; ω2с умовно вважається постійною. Початок графіка – прийняте початкове положення. Графік якісно відображає характер зміни кутової швидкості веденого шківа, а саме лінійне її зменшення під час вибиранні зазорів на обох шківах окремо а також три можливі варіанти зменшення кутової швидкості під час вибиранні зазорів на обох шківах одночасно. Коефіцієнт нерівномірності обертання веденої системи δωΔL визначений за формулою з [6, 7] при умові рівносповільненого руху веденої системи за інерцією: Якщо значення ωп буде близьким до ω2с , то нерівномірність обертання веденої системи буде незначною. Порівнюючи величини δωΔL і δω за нерівномірність обертання веденої системи слід вибрати більшу з них. Висновки. 1. Розглянута кінематична схема і кінематичні залежності дозволяють розробити дослідний зразок варіатора із втулково – роликовим ланцюгом. 2. Для досягнення більшої рівномірності передачі руху цим варіатором слід конструктивно досягти якомога меншого значення ΔL. 3. Очікується більш плавна робота варіатора за рахунок інерційності веденої системи. Бібліографічний список. 1. Машиностроение Энциклопедический справочник / Раздел первый, Инженерные расчеты в машиностроении, Том 2 .- Москва: Машгиз, 1948…. 2. Спосіб передачі обертового руху та регулювання швидкості втулочно - роликовим ланцюгом : деклараційний патент на винахід 30855А .- заявл.11.06.1998; опубл. 15. 12. 2000, Бюл.№7 - II. 3. Вузол передачі обертального руху ланцюгового варіатора: патент на винахід 30855 .- заявл.11.06.1998; опубл.15.08.2002 р. Бюл.№8. 4. Вузол передачі обертального руху вала на роликовий ланцюг безступінчастого ланцюгового варіатора: патент на корисну модель №49244. - заявл.21.10.2009; опубл.26.04.2010 р. Бюл.№8. 5. Цепные передачи/ Глущенко И. П., Петрик А.А. .- «Техніка», 1973.-104с… 6. Цепные передачи/ Воробьев Н. В. .- Москва: «Машиностроение», 1968…. 7. Кузнєцова А. К. Неравномерность движения и инерционные нагрузки в цепных передачах /Кузнєцова А. К.//Сб.статей: О цепных передачах .- Москва: Машгиз,1955 .-С. 29-45…. | |
| Переглядів: 1344 | Завантажень: 379 | | |
| Всього коментарів: 0 | |